
Δεν ξέρω πόσοι από εσάς είστε εξοικειωμένοι με το έργο του διάσημου βρετανού συγγραφέα έργων επιστημονικής φαντασίας, Sir Arthur C. Clarke και για να είμαι απόλυτα ειλικρινής, δεν χρειάζεται να είστε για τους σκοπούς αυτού του άρθρου. Το μόνο που χρειάζεται να ξέρετε, είναι πως ο Clarke «εμπνεύστηκε» τους τρεις νόμους της πρόβλεψης. Αυτοί είναι:
- Όταν ένας διακεκριμένος αλλά ηλικιωμένος επιστήμων λέει πως κάτι είναι πιθανό, έχει μάλλον δίκιο. Όταν λέει πως κάτι είναι απίθανο, μάλλον έχει άδικο.
- Ο μοναδικός τρόπος να ανακαλύψουμε τα όρια του πιθανού, είναι να περιπλανηθούμε λίγο μετά από αυτά, στο απίθανο.
- Οποιαδήποτε αρκετά προηγμένη τεχνολογία δεν διαφέρει σημαντικά από την μαγεία.
Εμάς μας ενδιαφέρει ο τρίτος αν και τα δύο πρώτα είναι εξίσου σημαντικά. Πολύ σωστά θα σκέφτεστε τώρα τι σχέση έχει η επιστημονική φαντασία με το αντικείμενό μας. Μην βιάζεστε όμως… Σε αυτή τη σειρά τεχνικών –αλλά όσο το δυνατόν κατανοητών και πληροφοριακών- άρθρων, θα προσπαθήσω να αναλύσω τα σύγχρονα ηλεκτρονικά συστήματα διαχείρισης των κινητήρων, τις περίφημες ECU (Engine Control Unit) ή EMS (Engine Management System), όπως θέλετε πείτε τις που σε πολλούς μοιάζουν με μαγικά κουτιά.
Θυμάστε την εποχή που πρακτικά οποιοσδήποτε μπορούσε να αλλάξει το μίγμα, κάνοντάς το φτωχότερο ή πλουσιότερο απλά περιστρέφοντας μία βελόνα; Την εποχή που με ένα στηθοσκόπιο και ένα κατσαβίδι/allen/οτιδήποτε ο ερασιτέχνης μηχανικός ήταν σε θέση να καλιμπράρει τον κινητήρα του; Την εποχή των πλατινών και των ντιστριμπιτέρ; Ωραίες εποχές ε; Εγώ δεν τις θυμάμαι και δεν πρόκειται να προσποιηθώ πως μου λείπουν ή πως ξέρω πως ήταν γιατί απλά δεν τις έζησα! Γεννήθηκα και μεγάλωσα την εποχή των ηλεκτρονικών, την εποχή των υπολογιστών, την εποχή που οι απαιτήσεις για περισσότερη ισχύ, μειωμένες εκπομπές ρύπων και χαμηλότερη κατανάλωση επέβαλλαν το ηλεκτρονικό engine management. Αφού το ξεκαθαρίσαμε αυτό, μπορούμε να προχωρήσουμε.
Η ηλεκτρονική διαχείριση ενός κινητήρα μπορεί να φανεί ως μαγεία σε κάποιον αμύητο, γι’ αυτό και συμπεριέλαβα τους τρεις νόμους της πρόβλεψης πιο πάνω, αλλά θέλω να πιστεύω πως μέχρι να τελειώσω, όλα θα έχουν ξεκαθαρίσει και θα διαπιστώσετε πως ενώ το έργο της διαχείρισης ενός κινητήρα είναι φοβερό δύσκολο και πολύπλοκο, δεν είναι τίποτα το τρομακτικό. Φυσικά, για αποφυγή παρεξηγήσεων και παρανοήσεων, να επισημάνω πως θα ασχοληθούμε μόνο με τον έλεγχο του κινητήρα και όχι άλλων υποσυστημάτων. Επικεφαλής αυτού που ονομάζουμε ηλεκτρονική διαχείριση είναι φυσικά η ECU, ο λεγόμενος και εγκέφαλος. Αυτός κάνει δύο και μόνο δύο σημαντικά πράγματα: ρυθμίζει τη ροή του καυσίμου και ελέγχει την ανάφλεξη ώστε η μηχανή να λειτουργεί ομαλά και όσο το δυνατόν πιο αποδοτικά! Αυτό το κάνει μέσω του ελέγχου που έχει πάνω σε διάφορους actuators (ενεργοποιητές). Όλα τα υπόλοιπα είναι δευτερεύοντα χωρίς βέβαια αυτό να σημαίνει πως είναι περιττά. Όμως, ακριβώς όπως ο ανθρώπινος εγκέφαλος δεν θα ήταν τίποτε χωρίς τα αισθητήρια όργανα που του παρέχουν τις απαραίτητες πληροφορίες, έτσι και ο εγκέφαλος του αυτοκινήτου, θα ήταν απλά ένα άχρηστο κουτί γεμάτο κυκλώματα αν δεν λάμβανε τεράστιες ποσότητες δεδομένων από διάφορους αισθητήρες. Ήδη λοιπόν, έχουμε την βασική δομή ενός συστήματος ηλεκτρονικής διαχείρισης κινητήρα: Μικροεπεξεργαστής και αισθητήρες και ενεργοποιητές. Στο πρώτο μέρος θα ασχοληθούμε με τα δύο πρώτα. Στην πορεία θα ανακαλύψετε ότι μάλλον σας «έκρυψα» κάποια επιμέρους εξαρτήματα. Μην το κρατήσετε μανιάτικο, το έκανα γιατί απλά τα θεωρώ ελάσσονος σημασίας και κατά συνέπεια όχι σκόπιμο να αναλυθούν περαιτέρω.

Ο μικροεπεξεργαστής (CPU) είναι ίσως το βασικότερο μέρος ενός συστήματος ηλεκτρονικής διαχείρισης. Στην πλειοψηφία των περιπτώσεων είναι ένα 32bitος microcontroller chip με ταχύτητα 20-40Mhz. Μην θεωρείτε μικρή την ταχύτητα, δεν είναι, αφού χάρη σε αυτή τη ταχύτητα, ο μικροεπεξεργαστής είναι σε θέση να επεξεργαστεί δεδομένα σε πραγματικό χρόνο… άνετα! Η αρχή λειτουργίας του δεν διαφέρει συγκρινόμενη με οποιονδήποτε οικιακό ή μη, υπολογιστή: Είσοδος -> Επεξεργασία -> Έξοδος. Στην είσοδο, βρίσκουμε τα σήματα από τους αισθητήρες. Αυτά, αν είναι απαραίτητο, περνούν από μετατροπείς που «μεταφράζουν» το αναλογικό σήμα σε ψηφιακό και άρα σε μορφή χρήσιμη για την CPU. Από την στιγμή που θα γίνει αυτό, η CPU ερμηνεύει τα δεδομένα χρησιμοποιώντας πολυδιάστατους χάρτες απόδοσης (θα δούμε την σημασία τους σε βάθος σε μελλοντικό άρθρο) και ρυθμίζει τους ενεργοποιητές ανάλογα (έξοδος). Όπως και στην είσοδο, έτσι και στην έξοδο υπάρχουν μετατροπείς που θα μετατρέψουν το σήμα που στέλνει αυτή τη φορά η ECU από ψηφιακό σε αναλογικό ή θα ενισχύσουν την τάση του σήματος ή θα τροποποιήσουν γενικά το σήμα ώστε να έρθει σε μορφή αξιοποιήσιμη από τον εκάστοτε ενεργοποιητή. Η ερμηνεία και κατά συνέπεια το σήμα εξόδου που θα προέλθει από την ECU εξαρτάται από το λογισμικό που φέρει η CPU. Αυτό το λογισμικό αποτελείται από χάρτες απόδοσης όπως σας είπα προηγουμένως, πρωτόκολλα λειτουργίας και επικοινωνίας, διάφορα αλγοριθμικά προγράμματα κ.ά. Όλα αυτά μας φέρνουν κομψά στο θέμα που ονομάζεται μνήμη της CPU. Συνήθως στα οχήματα, ο εγκέφαλος έχει στη διάθεσή του 3 με 4 είδη μνήμης. Την RAM στην οποία αποθηκεύονται προσωρινά πληροφορίες μέχρι να τις ανακτήσει η CPU (συνήθως αυτές οι πληροφορίες αφορούν σήματα από και προς αισθητήρες), την ROM στην οποία αποθηκεύονται μόνιμα πληροφορίες σχετικές με χαρακτηριστικά λειτουργίας του κινητήρα και/ή κάποια πρωτόκολλα χωρίς δυνατότητα επεξεργασίας και την PROM ή EPROM που μοιάζει με την ROM με τη μοναδική (σημαντική) διαφορά ότι υπόκειται σε επαναπρογραμματισμό. Κάποια οχήματα είναι εφοδιασμένα και με flash memory που είτε λειτουργεί παράλληλα είτε αντικαθιστά την PROM/EPROM. Σε γενικές γραμμές κλείσαμε με το κεφάλαιο ECU αλλά ακόμα δεν έχουμε ανοίξει το κεφάλαιο αισθητήρες, που κατά τη γνώμη μου είναι πιο σημαντικό για την κατανόηση της διαχείρισης του κινητήρα από τον εγκέφαλο… Την διαδικασία την ξέρετε, καφεδάκι, ρύθμιση της καρέκλας σε άνετη θέση και συνεχίζουμε.
Ήδη πιο πάνω σύγκρινα τους αισθητήρες που υπάρχουν σε διάφορα σημεία στον κινητήρα του αυτοκινήτου μας με τα αισθητήρια όργανα του ανθρωπίνου σώματος και αυτό από μόνο του, αν και μοιάζει αυταπόδεικτο και λογικό, δείχνει την σημασία που έχουν οι αισθητήρες στην σύγχρονη μηχανική και ηλεκτρονική. Όλη αυτή η πρόοδος άλλωστε στα συστήματα διαχείρισης δεν θα ήταν εφικτή αν δεν συμβάδιζε με την πρόοδο στην τεχνολογία παρακολούθησης, στους αισθητήρες με λίγα λόγια. Σε αυτό το σημείο αξίζει να αναφέρω πως τα συστήματα ηλεκτρονικής διαχείρισης χωρίζονται γενικά σε δύο (τουλάχιστον) κατηγορίες: Στα speed-density (ταχύτητα-πυκνότητα) συστήματα, που πήραν το όνομά τους από το γεγονός πως για να λειτουργήσουν τον κινητήρα υπολογίζουν την ταχύτητα περιστροφής του και την πυκνότητα του εισερχόμενου αέρα και τα mass air flow συστήματα που μαζί με την πυκνότητα του εισερχόμενου αέρα, «βλέπουν» και την ροή του. Τις ομοιότητες και διαφορές καθώς και τα πλεονεκτήματα του ενός απέναντι στο άλλο θα τα δούμε στο επόμενο άρθρο. Τώρα πρέπει να δούμε τους αισθητήρες που χρειάζονται αυτά τα δύο συστήματα για να λειτουργήσουν. Στην (θεωρητική) πιο βασική μορφή του, ένα ηλεκτρονικό σύστημα διαχείρισης, απαιτεί μόνο δύο ειδών αισθητήρες. Φορτίου και ταχύτητας/θέσης κινητήρα. Ωστόσο όσο περισσότερο περιορίζουμε τον αριθμό των αισθητήρων, τόσο περιορίζουμε και την προσαρμοστικότητα του συστήματος καθώς και την ικανότητα του να λειτουργήσει στο ανώτατο επίπεδο. Προφανώς υπάρχει επικάλυψη όσον αφορά στους αισθητήρες που χρησιμοποιούν τα δύο συστήματα, οπότε ας ξεκινήσουμε από τους κοινούς:
Αισθητήρας ταχύτητας και θέσης στροφαλοφόρου άξονα (CPS)

Αυτοί οι αισθητήρες μπορεί να διαφέρουν στην μορφή τους, από οπτικούς σε επαγωγικούς σε αισθητήρες Hall όμως η βασική αρχή λειτουργίας τους είναι όμοια. Χρησιμοποιούν σημάδια στον στροφαλοφόρο άξονα για να παρατηρούν τόσο την ταχύτητά του όσο και την θέση του σε σύγκριση πάντα με το Άνω Νεκρό Σημείο.
Επαγωγικός: Αυτού του τύπου ο αισθητήρας είναι μάλλον ο πιο δημοφιλής από τους τρεις και αποτελείται από έναν μόνιμο μαγνήτη και ένα επαγωγικό πηνίο με πυρήνα από σίδηρο. Η μαγνητική ροή στο πηνίο εξαρτάται από το αν ο αισθητήρας είναι απέναντι από κενό ή δόντι (στην οδοντωτή στεφάνη γύρω από τον στρόφαλο) και μεταβολή αυτής της ροής παράγει τάση από επαγωγή. Η τάση αυτή –προφανώς- εξαρτάται από την ταχύτητα περιστροφής του στροφαλοφόρου άξονα ενώ ο αισθητήρας αναγνωρίζει και την θέση αυτού μέσω ενός ή δύο κενών στην οδοντωτή στεφάνη (σημάδι αναφοράς). Άξιο αναφοράς είναι ότι τέτοιου είδους αισθητήρες παράγουν το δικό τους σήμα και επομένως δεν χρειάζεται παροχή τάσης για να λειτουργήσει.
Οπτικός: Οι οπτικοί CPS, χρησιμοποιούν ένα LED ή ένα laser που είναι τοποθετημένο στη μία μεριά του αισθητήρα, έναν δέκτη (ένα φωτοβολταϊκό «μάτι» αν θέλετε) στην άλλη μεριά για να ανιχνεύσει το πέρασμα ή όχι του φωτός και μία στεφάνη είτε με δόντια είτε με εγκοπές. Προφανώς υπάρχει ένα ξεχωριστό σημάδι αναφοράς (μία εγκοπή διπλάσια σε μέγεθος από το κανονικό ή κάποιο κενό στην οδοντωτή στεφάνη) για τον προσδιορισμό του 1ου κυλίνδρου και από εκεί και πέρα η λειτουργία του είναι εξαιρετικά απλή. Τέτοιου είδους αισθητήρες, επειδή είναι πιο αξιόπιστοι σε υψηλούς ρυθμούς περιστροφής, προτιμούνται σε αγωνιστικές εφαρμογές.
Αισθητήρας Hall: Δεν είχα σκοπό να σας εξηγήσω κάθε μορφή CPS αλλά το έκανα μόνο και μόνο για να σας εξηγήσω τους αισθητήρες Hall. Πίσω στο 1879, ο Edwin Hall παρατήρησε πως όταν τροφοδοτούσε με ρεύμα ένα κομμάτι μέταλλο που βρισκόταν ανάμεσα σε δύο μαγνήτες, δημιουργείτο μία δευτερεύουσα τάση σε γωνία με την αρχική. Αυτό είναι το φαινόμενο Hall και ενώ δεν είχε καμία πρακτική εφαρμογή εκείνη την εποχή, θα άνοιγε τον δρόμο σε μηχανικούς (όχι μόνο μηχανολόγους) για τη δημιουργία μία συσκευής ικανής να παράγει on/off τετράγωνη κυματομορφή τάσης! Στη σημερινή μορφή του, όταν ένα κομμάτι μέταλλο (ή ένα δόντι σε μία στεφάνη ή ένα σημάδι σε μία τροχαλία ή ακόμα και ένας περιστρεφόμενος μαγνήτης) περάσει από το κενό ανάμεσα σε ένα μαγνητικό πεδίο προκαλούμενο από κάποιον ηλεκτρομαγνήτη και έναν ημιαγωγό, μπλοκάρει το εν λόγω πεδίο και μηδενίζει την τάση εξόδου. Με επιπρόσθετα κυκλώματα, το ίδιο κομμάτι μέταλλο μπορεί να κάνει το αντίθετο: να «ενεργοποιεί» την τάση στην έξοδο μπλοκάροντας το μαγνητικό πεδίο. Απλό αλλά θαυματουργό. Μπορεί να μοιάζει με τον επαγωγικό CPS όμως είναι πολύ διαφορετικοί. Δεν είμαι σίγουρος αν σε τόσο λίγες γραμμές κατάφερα να τονίσω τις διαφορές στη λειτουργία όμως για μελλοντική αναφορά κρατήστε πως ο αισθητήρας Hall θεωρείται περισσότερο διακόπτης (εξαιτίας της σχεδόν τετράγωνης κυματομορφής) παρά αισθητήρας.
Αισθητήρας θερμοκρασίας ψυκτικού (CTS)
 Μου αρέσουν οι αυτονόητοι αισθητήρες. Δεν χρειάζεται φιλοσοφία ή διδακτορικό στην πυρηνική φυσική για να καταλάβεις τι κάνει ο συγκεκριμένος αισθητήρας. Είναι συνήθως τοποθετημένος στην κυλινδροκεφαλή και μετράει την θερμοκρασία του ψυκτικού μέσου του κινητήρα. Υπάρχουν δύο ειδών CTS: Αυτοί που χρησιμοποιούν την θερμοκρασιακή συνάρτηση της αντίστασης με θετικούς συντελεστές και αυτοί που κάνουν το ίδιο πράγμα με αρνητικούς. Η διαφορά είναι απλή αν το διατυπώσω λιγότερο «επιστημονικά». Στην πρώτη περίπτωση, αν ο αισθητήρας εκτεθεί σε ζεστό ψυκτικό η εσωτερική αντίσταση θα ανέβει ενώ στην δεύτερη θα πέσει. Σε οποιαδήποτε περίπτωση το σήμα (τάση) που θα στείλει ο αισθητήρας, θα συγκριθεί με την τάση αναφοράς και ο εγκέφαλος θα ρυθμίσει το καύσιμο και την ανάφλεξη ανάλογα. Πολλές φορές τα δεδομένα του CTS χρησιμοποιούνται και για το αν θα λειτουργήσει ή όχι ο ανεμιστήρας.
Μου αρέσουν οι αυτονόητοι αισθητήρες. Δεν χρειάζεται φιλοσοφία ή διδακτορικό στην πυρηνική φυσική για να καταλάβεις τι κάνει ο συγκεκριμένος αισθητήρας. Είναι συνήθως τοποθετημένος στην κυλινδροκεφαλή και μετράει την θερμοκρασία του ψυκτικού μέσου του κινητήρα. Υπάρχουν δύο ειδών CTS: Αυτοί που χρησιμοποιούν την θερμοκρασιακή συνάρτηση της αντίστασης με θετικούς συντελεστές και αυτοί που κάνουν το ίδιο πράγμα με αρνητικούς. Η διαφορά είναι απλή αν το διατυπώσω λιγότερο «επιστημονικά». Στην πρώτη περίπτωση, αν ο αισθητήρας εκτεθεί σε ζεστό ψυκτικό η εσωτερική αντίσταση θα ανέβει ενώ στην δεύτερη θα πέσει. Σε οποιαδήποτε περίπτωση το σήμα (τάση) που θα στείλει ο αισθητήρας, θα συγκριθεί με την τάση αναφοράς και ο εγκέφαλος θα ρυθμίσει το καύσιμο και την ανάφλεξη ανάλογα. Πολλές φορές τα δεδομένα του CTS χρησιμοποιούνται και για το αν θα λειτουργήσει ή όχι ο ανεμιστήρας.
Αισθητήρας θερμοκρασίας αέρα (ATS)

Επίσης, πολύ απλός αισθητήρας. Κάνει αυτό που λέει: μετράει την θερμοκρασία του εισερχόμενου στον κινητήρα αέρα. Τον ATS θα τον βρείτε κάπου στο «μονοπάτι» της εισαγωγής ή ακόμη και μέσα στο plenum και λειτουργεί ακριβώς όπως ο CTS. Αντίσταση, θερμός-κρύος αέρας, μεταβολή αντίστασης ανάλογα με τη θερμοκρασία, σήμα στην ECU και σύγκριση με το σήμα αναφοράς. Δεν νομίζω πως χρειάζεται περαιτέρω εξηγήσεις.
Αισθητήρας θέσης πεταλούδας (TPS)
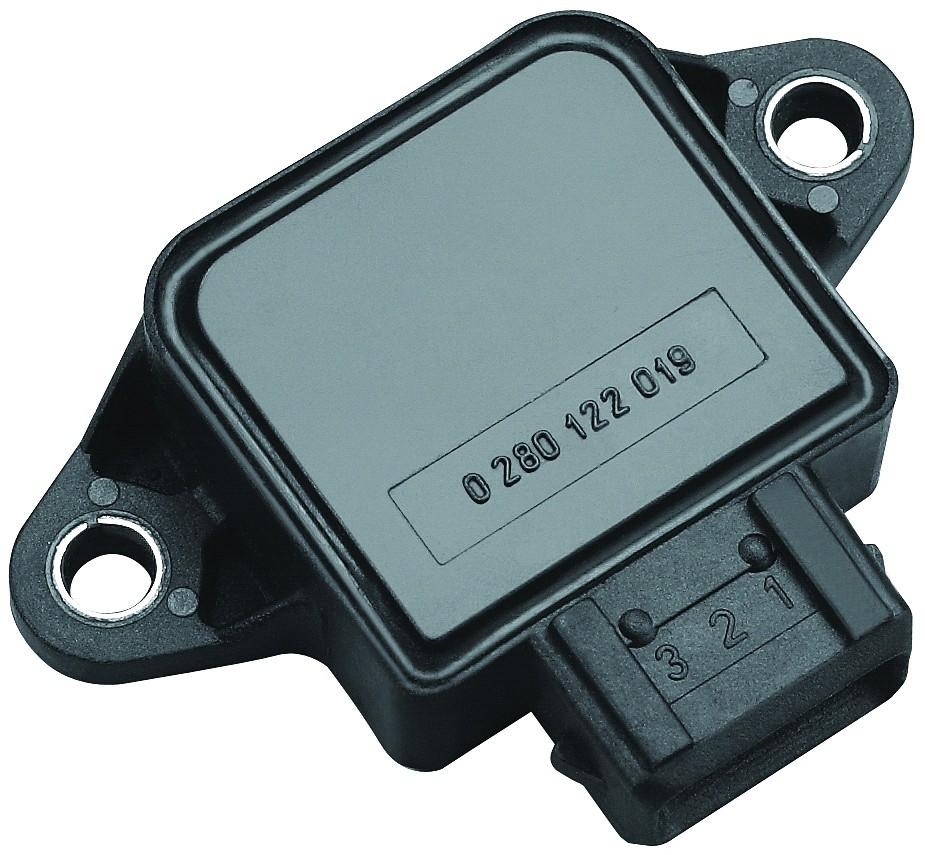
Αυτός είναι ένας αισθητήρας μεταβλητής αντίστασης που μετατρέπει την γωνία της πεταλούδας εισαγωγής σε τάση (συνήθως με γραμμική σχέση). Πχ: Έστω ένας TPS που λειτουργεί με εύρος 0-5V –συνήθως εκεί κυμαίνονται-. Σε αυτή την περίπτωση, τα 0V αντιστοιχούν σε κλειστή πεταλούδα, τα 2,5V αντιστοιχούν σε πεταλούδα ανοιχτή κατά το ήμισυ και τα 5V αντιστοιχούν σε ορθάνοιχτη πεταλούδα. Σε ορισμένα συστήματα, βλ. “drive-by-wire”, ο TPS έχει αντίστοιχα και αισθητήρα στο πεντάλ του γκαζιού. Πιο προηγμένα συστήματα χρησιμοποιούν το φαινόμενο Hall: ένας μαγνήτης είναι τοποθετημένος στον μηχανισμό της πεταλούδας και ο Hall sensor είναι σταθερός στο σώμα. Όταν η πεταλούδα κινείται, κινεί παράλληλα και τον μαγνήτη ο οποίος μεταβάλλει το μαγνητικό πεδίο. Ο αισθητήρας Hall αντιλαμβάνεται την μεταβολή, την «μεταφράζει» σε τάση εξόδου και από εκεί και πέρα η διαδικασία είναι όπως αυτή που ανέφερα πιο πάνω. Η σημασία του TPS είναι πιστεύω αυτονόητη αφού μέσω της θέσης της πεταλούδας –και άλλων μεγεθών φυσικά- υπολογίζεται το φορτίο του κινητήρα.
Αισθητήρας προανάφλεξης (Knock Sensor, KS)

Ok, δεν είναι ακριβώς κοινός αισθητήρας αλλά οφείλω να τον συμπεριλάβω αφού κάποια αυτοκίνητα τον χρησιμοποιούν. Προανάφλεξη σε έναν βενζινοκινητήρα με απλά λόγια, ονομάζουμε το φαινόμενο όπου το καύσιμο μίγμα μέσα στον θάλαμο καύσης αναφλέγεται πριν τον σπινθήρα από το μπουζί. Το knocking (πειράκια) είναι λίγο διαφορετικό, αφού βάζει στο «παιχνίδι» το μέτωπο φωτιάς που δημιουργεί το μπουζί. Ως knocking λοιπόν ορίζουμε το φαινόμενο όπου μέρος του καύσιμου μίγματος αναφλέγεται (συνήθως εκρηκτικά) εκτός του μετώπου φλόγας που δημιουργήθηκε από το μπουζί. Όπως και να έχει ο KS εντοπίζει και τα δύο φαινόμενα. Μέσα στον KS, υπάρχει ένα πιεζοηλεκτρικό στοιχείο. Αυτού του είδους τα στοιχεία γενικά παράγουν ηλεκτρισμό όταν δονηθούν/πιεστούν. Το πιεζοηλεκτρικό στοιχείο εντός του KS, είναι ρυθμισμένο να αντιδρά σε συχνότητες 7-12Khz (αυτές τις συχνότητες παράγει το knocking ή η προανάφλεξη) και όταν τις ανιχνεύσει στέλνει σήμα στην ECU να αλλάξει ότι είναι να αλλάξει για να σταματήσει αυτό το καταστροφικό φαινόμενο.
Αισθητήρας λάμδα

Τώρα σοβαρεύει το πράγμα αφού αυτός ο αισθητήρας είναι ένας από τους σημαντικότερους στα σύγχρονα αυτοκίνητα. Τον αισθητήρα λάμδα ή αισθητήρα οξυγόνου τον βρίσκουμε στην εξάτμιση του αυτοκινήτου, κάπου μετά την πολλαπλή εξαγωγής και πριν τον καταλύτη και η βασική του λειτουργία είναι να κρίνει αν το καύσιμο μίγμα που εισέρχεται στον θάλαμο καύσης είναι «πλούσιο» ή «φτωχό». Καθώς όμως δεν υπάρχει κάποιος μαγικός τρόπος για να το κάνει αυτό, δεν το κάνει άμεσα, αλλά έμμεσα. Δηλαδή, συγκρίνει την περιεκτικότητα σε οξυγόνο στα καυσαέρια και στον αέρα και παράγει ένα σήμα/τάση που απλοϊκά μπορούμε να πούμε πως αντιστοιχεί στην αναλογία του καύσιμου μίγματος. Όσο μεγαλύτερη η διαφορά σε περιεκτικότητα οξυγόνου ανάμεσα στα καυσαέρια και τον αέρα, τόσο μεγαλύτερη η τάση άρα το μίγμα είναι πλούσιο. Αντίστοιχα, μικρή διαφορά παράγει μικρή τάση άρα το μίγμα είναι φτωχό. Χοντρικά να αναφέρω πως η στοιχειομετρική αναλογία (14,7:1) δίνει τάση περίπου 0,45V και πως η τάση αυτή δεν μένει ποτέ σταθερή αλλά μεταβάλλεται συνεχώς από 0,1V(πολύ φτωχό μίγμα) έως 0,9V (πολύ πλούσιο) χωρίς αυτά τα νούμερα να υπονοούν πως υπάρχει κάποιου είδους γραμμική συσχέτιση μεταξύ οξυγόνου και τάσης. Δεν υπάρχει! Στην ουσία, ένας αισθητήρας λ είναι ένας ηλεκτρολύτης (οξείδιο του ζιρκονίου) με δύο ηλεκτρόδια από πλατίνα και συνήθως ένα στοιχείο που θερμαίνει τον αισθητήρα για να φτάσει στη θερμοκρασία λειτουργίας του. Ο ηλεκτρολύτης έχει τη μία πλευρά του εκτεθειμένη στα καυσαέρια και την άλλη στον αέρα. Η ηλεκτροχημική διαδικασία κατά την οποία παράγεται τάση (άρα σήμα) από τον αισθητήρα λ είναι ελαφρώς πολύπλοκη και έξω από την comfort zone μου οπότε δεν θα προσπαθήσω να την εξηγήσω.
Τα τελευταία χρόνια έκαναν την εμφάνισή τους σε πιο εξειδικευμένες κατασκευές και λεγόμενοι wideband αισθητήρες λ. Αυτοί, σε σύγκριση με τους πιο κοινούς, narrowband, που περιέγραψα πιο πάνω έχουν τρεις σημαντικές διαφορές. Πρώτη είναι η διαφορά στη λειτουργία τους. Ο wideband δεν υπολογίζει την διαφορά στην περιεκτικότητα σε οξυγόνο των καυσαερίων και του αέρα αλλά υπολογίζει απευθείας την περιεκτικότητα σε οξυγόνο των καυσαερίων. Δεύτερον, ο wideband αισθητήρας λ είναι σε θέση να «βλέπει» πολύ μεγαλύτερο εύρος στην αναλογία αέρα-καυσίμου και πιο γρήγορα μάλιστα. Και τρίτον, επειδή διαφέρει τόσο σε κατασκευή όσο και σε λειτουργία, η τάση/σήμα που παράγει συνδέεται αναλογικά με το οξυγόνο που «διαβάζει». Κάντε λίγη ακόμα υπομονή, τελειώνουμε. Φτάσαμε στην ειδοποιό διαφορά των δύο κατηγοριών συστημάτων ηλεκτρονικής διαχείρισης:
MAP vs MAF

Όπως φαντάζομαι πως καταλάβατε, τα speed-density συστήματα χρησιμοποιούν τον αισθητήρα MAP (Manifold Absolute Pressure) ενώ τα mass air flow συστήματα χρησιμοποιούν τον ομώνυμο αισθητήρα. Ο αισθητήρας MAP, είναι ένας αισθητήρας φορτίου. Διαβάζει την απόλυτη πίεση (κενό) που επικρατεί στην εισαγωγή του κινητήρα (ανάμεσα στην πεταλούδα εισαγωγής και τις βαλβίδες εισαγωγής), την μεταφράζει σε τάση και την στέλνει στην ECU. Με αυτό το δεδομένο, η ECU θα υπολογίσει την πυκνότητα και τη ροή του αέρα εντός του κινητήρα και θα καθορίσει το καύσιμο, το αβάνς κ.ά. Απλά και αποδοτικά. Ορισμένες φορές ένας αισθητήρας MAP μπορεί να λειτουργεί και ο βαρόμετρο που χρησιμοποιείται κατά την πρώτη εκκίνηση και τροφοδοτεί την ECU με την ατμοσφαιρική πίεση εκείνη τη στιγμή. Έτσι η τελευταία θα αυτορυθμιστεί για να μην έχει σημαντικές αποκλίσεις από την πραγματικότητα.

Τα πράγματα όμως άλλαξαν με τους αισθητήρες MAF. Αυτοί μετρούν (έμμεσα) τη ροή του αέρα στην εισαγωγή. Παρότι υπάρχουν πολλών ειδών MAF, εμείς θα ασχοληθούμε εν συντομία με τους πιο κοινούς: τους hotwire και τους coldwire. Οι hotwire MAFs, χρησιμοποιούν ακριβώς αυτό που λέει το όνομά τους. Ένα καλώδιο, το οποίο τροφοδοτείται με ρεύμα, άρα ζεσταίνεται. Η αντίσταση του καλωδίου αυξάνεται όσο αυξάνεται η θερμοκρασία του, κάτι που περιορίζει το ρεύμα που διαρρέει το σύστημα. Όταν όμως περνάει αέρας από το καλώδιο, το ψύχει με αποτέλεσμα να μειώνει την αντίστασή του και άρα να περνάει περισσότερο ρεύμα. Όσο όμως περνάει περισσότερο ρεύμα, το καλώδιο ξαναθερμαίνεται μέχρι να αποκατασταθεί η ισορροπία. Η «ποσότητα» ρεύματος που απαιτείται για να διατηρηθεί η θερμοκρασία του καλωδίου, είναι ανάλογη της μάζας του αέρα που περνάει από το καλώδιο! Ένα ενσωματωμένο ηλεκτρονικό κύκλωμα κάνει τις απαραίτητες μετατροπές και στέλνει το σήμα στην ECU. Τόσο εύκολο. Οι coldwire MAFs από την άλλη χρησιμοποιούν έναν αισθητήρα του οποίου η επαγωγή αλλάζει με την ροή του αέρα από πάνω του. Αυτός ο αισθητήρας είναι μέρος ενός ταλαντωτή. Όπως μάλλον μαντέψατε, η συχνότητα του ταλαντωτή αλλάζει με την επαγωγή του αισθητήρα άρα με την ροή του αέρα. Αυτού του είδους οι MAF χρησιμοποιούνταν κυρίως από την GM στους LS κινητήρες.
Νομίζω πως σε πρώτη φάση καλύψαμε τους περισσότερους σημαντικούς αισθητήρες. Φυσικά υπάρχουν πολύ περισσότεροι όπως ο αισθητήρας θέσης εκκεντροφόρου, ο αισθητήρας ταχύτητας, ο αισθητήρας θερμοκρασίας καυσίμου, λιπαντικού κ.ά., ο αισθητήρας φάσης και ένας θεός ξέρει τι άλλο. Δεν θέλω όμως να σας κουράσω περαιτέρω. Ήδη το έχω τραβήξει πάρα πολύ και δεν είμαι καν σίγουρος πόσοι από εσάς φτάσατε μέχρι αυτό το σημείο αλλά έπειτα από κάποιους υπολογισμούς και άφθονη σκέψη κατέληξα στο συμπέρασμα πως δεν μπορώ να κάνω άλλη έκπτωση. Έπρεπε να πω κάποια πράγματα, όχι μόνο για τους σκοπούς αυτού του άρθρου αλλά για να ξέρουμε πέντε πράγματα παραπάνω για το πώς και το γιατί όσον αφορά το αυτοκίνητο. Στο δεύτερο μέρος της σειράς θα επανέλθω με το τι κάνει με όλες αυτές τις πληροφορίες η ECU. Ελπίζω να μην με σιχαθήκατε και να επιστρέψετε…